Overview animation of glider movements during MASSMO 4 (Marine Autonomous Systems in Support of Marine Observations) in the Faroe-Shetland Channel in May-June 2017. MASSMO is a pioneering multi-partner series of trials and demonstrator missions that aim to explore the UK seas using a fleet of innovative marine robots. This animation shows some qualitative comparisons between the glider data (DSTL, NOC) with satellite altimetry (Copernicus), satellite-derived front position (PML) and FOAM AMM7 model data (Copernicus). Bathymetry is GEBCO, animation created using Paraview.

This animation combined numerous different datasets, and varied in scale from entire ocean basins to internal front structure measuring a few kilometres. As in other recent Paraview projects, I created the whole animation in spherical coordinates. This entailed using trigonometry to convert (lat,lon,depth) to positions on a global sphere of radius 1. The ocean was exaggerated by 75 times so the internal structure could easily be seen.
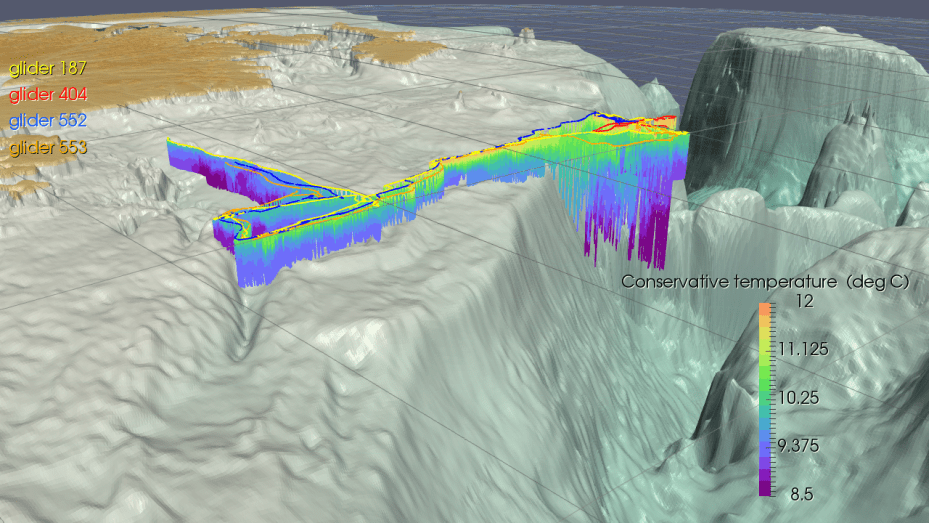
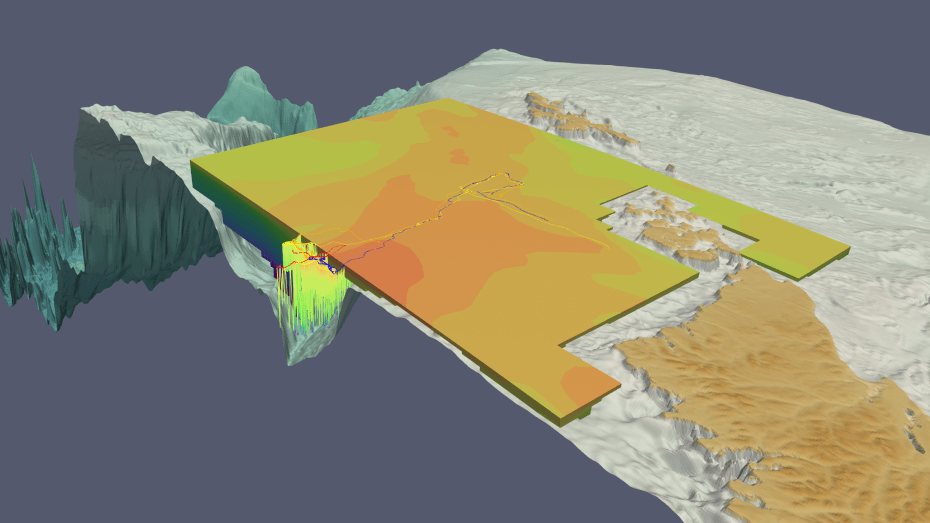
During the mission, three of the gliders investigated a frontal region visible on satellite imagery. Satellites can’t ‘see’ below the sea surface, so the fleet of gliders was able to responsively move to the location of the front and map the 3D internal structure.


The mission was supported by the Met Office FOAM (Forecast Ocean Assimilation Model) which provided context for the glider observations.

