Testing a tracer release in FVCOM unstructured grid model of Ardmucknish Bay and Loch Etive. A simulated AUV (Autonomous Underwater Vehicle) sampling mission is piloted through the plume. FVCOM model was provided by Dr. Dmitry Aleynik and AUV simulation designed by Dr. Matt Toberman. This builds on the more basic explorations of the Loch Etive FVCOM model in Paraview here.
Getting the model and local terrain / aerial imagery to line up was challenging as they all use different coordinate systems!
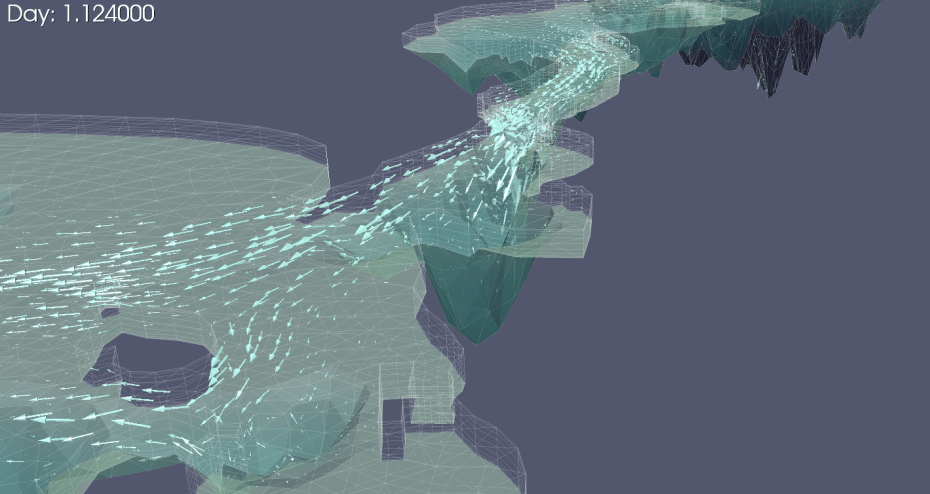
The dye release is a scalar quantity in the model. Here I visualised it using the ‘volume’ filter, with lower concentrations increasing in transparency.