oceanographer, photographer, artist based in Argyll, Scotland
HECLA – further visualisation of glider data
The Navy HECLA project is a continuation of the MASSMO exercises which I have contributed to in the past. It aims to bring underwater and surface autonomous vehicles to an operational level. My role in these exercises is mainly data visualisation, but I’ve also experimented with simple methods for assimilating glider observations into model data.
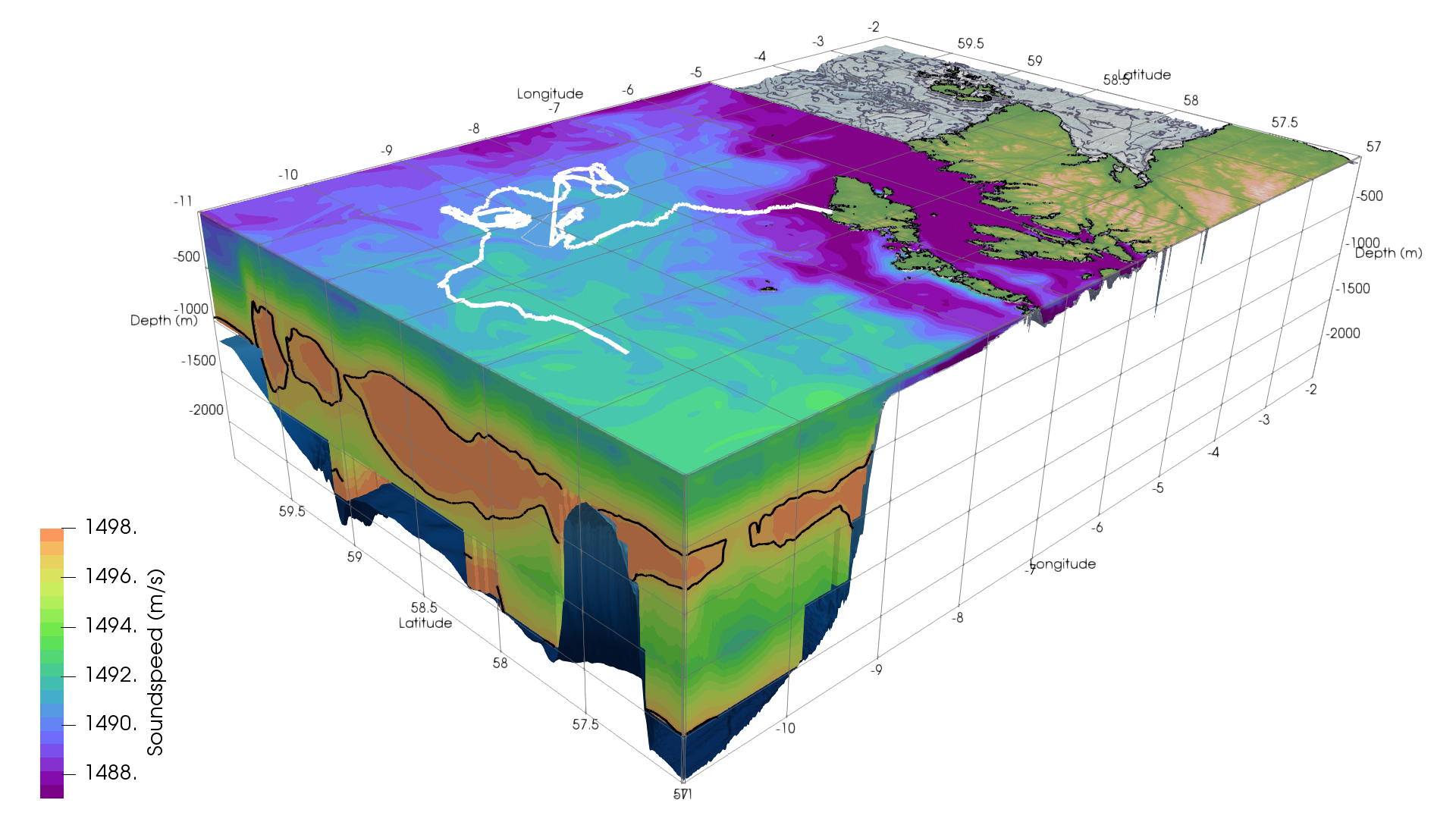
Two gliders deployed during a recent HECLA mission. 3D modelled temperature data is sliced vertically to reveal glider data.
Glider track from recent HECLA mission, intersecting model data. The ‘before’ image shows modelled sound speed, with the 1497 m/s contour highlighted. The ‘after’ image is the 3D 1497 m/s contour, bisected by the glider flight.Animated gif showing glider occupation and its impact on modelled salinity data. The model is modified by the glider observations using a region of influence which fades over time.